UAV/FPV-project: OSD v2.0
|
SummaryThis device allows me to see battery voltage, GPS- and IMU-data, along with other useful information superimposed on the camera picture. As of today, I've also implemented waypoint-support. This means I can store positions, and calculate bearing and distance between these waypoint, which in turn can be easily used as part of an autopilot as well! |
Hardware
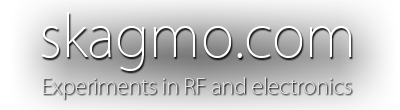
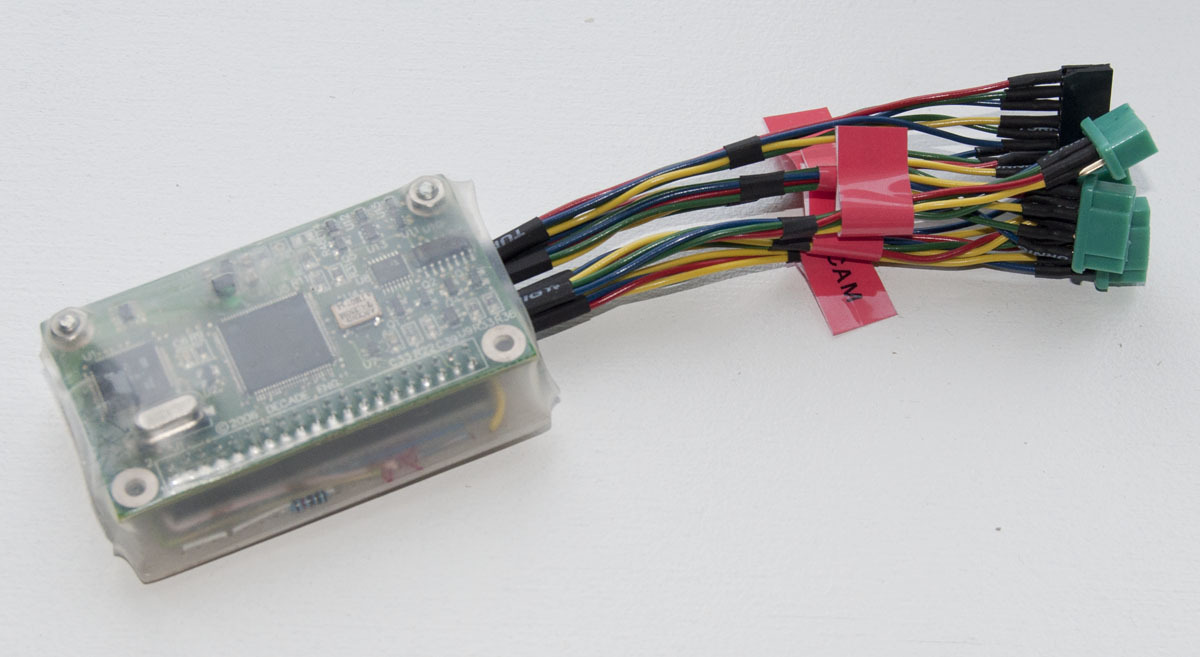
The hardware is based on a BOB4-module, and a PIC18F2620 does everything besides generating the text and graphics. The hardware is pretty simple, as there are pretty few components and mostly digital signals. I use MPX-connectors all the way, and the device is simply covered in heat shring tubing, as shown below.
The OSD is connected to a Razor IMU and a 10Hz GPS loaded with a firmware allowing a binary output format. Parsing NMEA uses a lot of resources, so it really should be avoided in uC applications like this.
Testing
After writing about a thousand lines of C-code, I got the general GPS- and waypoint-functionality working. Shown below is a screen shot from a flight.